����ͣ܇�T��ϵ�y�ЄӑB·���T�����g�о�
���ٙ�Ŀ�����ܿƌW���gՓ�� �l�����ڣ�2010-09-19 08:37 ��ȣ�
����ժҪ��Ŀǰͣ܇�T����Ϣϵ�y�ǣ�ParkingGuidanceandInformationSystem�����QPGIS����Ҫͨ�^·߅�Ŀ�׃��Ϣ�@ʾ�壬���{����ṩ���r���ʴ_��ȫ���܇λ��Ϣ��������ͨ�^���m��·�������_���m��ͣ܇�����@�N�T��ģʽ���Ό��ã����o�����]��ͬ�{��ߵIJ�ͬҪ���o�����Fϵ�y�cʹ����֮�g�Ļ��ӡ������ڷ���Ŀǰͣ܇�T��ϵ�y�F��Ļ��A�ϣ���܇�dͣ܇�T���ĽǶȳ��l����܇�v���_ͣ܇���ĕr�g��̞郞��Ŀ�ˣ����·���������\��Λρ�㷨���{�T�ṩ���_ͣ܇�����·����
�����P�I�~��ͣ܇�T��ϵ�y��·�������������\ݔϵ�y��ITS����Λρ�㷨
����1.ǰ��
����Ŀǰ��ͣ܇�T��ϵ�y��Ҫͨ�^·߅�Ŀ�׃��Ϣ�@ʾ�壬���{����ṩ���r���ʴ_��ȫ���܇λ��Ϣ��������ͨ�^���m��·�����T���{�T��Ч���ҵ�ͣ܇��λ���Ԝp���{�T�ڌ���܇λ�^���Ў�����“�oЧ”��ͨ�������⽻ͨ��D�����ƽ�ͨ�����Эh������Ⱦ���@�N�T��ģʽ���Ό��ã���Ҳ����һЩȱ�c�������ṩ����Ϣ���ޣ��o�����]��ͬ�{��ߵIJ�ͬҪ���o�����Fϵ�y�cʹ����֮�g�Ļ��ӡ�܇�dGPS������ͣ܇�T����Ϣϵ�y���܉����܇�v����λ�á�Ŀ�ĵأ��Y��GIS���g�����r���{�T�ṩ���_ͣ܇�������·�����Ķ����F�ӑBͣ܇�T����
����2.ͣ܇�T��ϵ�y�F����چ��}
����Ŀǰ��PGIS��Ҫ���Ă����ֽM�ɣ�·߅��׃��Ϣ�@ʾ�塢ͣ܇����Ӌ���b�á��������ĺ�ͨ�žW�j���乤��ԭ����ͨ�^��܇λ�ɼ����ɼ�ͣ܇��������ʣ��Ŀ�λ�������^��������Ӌ��C̎�����ɔ�����ݔ�O�����·߅�����@ʾ�ƣ���ͣ܇�����Q��ռ����r����λ�ȣ����ڌ��H��ʹ�����@�N�T��ϵ�y߀���ڲ��ن��}�����£�
����2.1ͣ܇�T��ϵ�y���Ј������Բ���
�����������\�е�ͣ܇�T���Ŀ��Ͷ�Y���\�I��r�����l�Fͣ܇�T��ϵ�y���Ј��\���ɲ����Բ�������Ҫ������ͣ܇�T��ϵ�y���к��Ĺ����ԣ��c���I��ͣ܇��֮�g���y�ҵ�һ�Nǡ����ӯ��ģʽ��
����2.2�{��ͣ܇�T��ϵ�y��λ�٣��T��ϵ�yʹ���ʵ�
����Ŀǰ�{��ͣ܇�T��ϵ�y��ͣ܇�����ǹ��������佨ͣ܇���͘O�ٵ�·���ͣ܇���������@Щͣ܇����Ҫλ���̘I���A�ضΣ����������ʸߣ�������C��܇�ȴ�܇λ���M��܇λ������Ӱ푄ӑB��ͨ��ҹ�g���ö࣬����YԴ�����M��ͬ�r���T��ϵ�y����Ϣ߀�]�����{�T���γ�Ӱ푣�ʹ�������ޣ��������^�͡�
����2.3��ͣ܇�T��ϵ�y�����\�����]����Ϣ����
������ϵ�y���Ъ����Ĺ������ĺ�ͨӍƽ�_�����Ԫ����\�����քe����ͨӍ��˾�ľ�·���\�I�M�øߣ���ϵ�y����Ϣ��С���y�Խ�������������Ϣ�l����ʽ�������@����Ϣ�������٣��o�����F���ܽ�ͨϵ�y��·���T����
����2.4ͣ܇���S�֬F���Ը������Ͷ��
��������ͣ܇�T��ϵ�y�Ĺ����ԣ��]��ӯ���������Oһ��������ͣ܇�T��ϵ�y�����˺��_ϵ�y�⣬߀��Ҫͣ܇��Ͷ���Y���O�܉��Ԅәz�y�ղ�λ�����O�䣬���@�N��r�£�ͣ܇������þS�֬F�����M��ʽ�đB�ȡ�
����2.5ijЩ�@ʾ���OӋ����������Ϣ�l�����ʴ_
�����l��������ʾЧ�����ã����ױ��ߴ��ľ�ړ��������ױ��{�T�������T���^���^խ���A�湦����������ָʾ������e���ޣ��܉��@ʾ����Ϣ��Ҳ���ޡ�
����2.6��Ϣ�l����ʽ��һ���]���_���OӋ��Ҫ��
������ϵ�y���w����С��ʹ���е�ͣ܇�T��ϵ�y��Ϣ�l����ʽֻ���F���OӋ�е�·߅ҕ�X��Ϣ�l���Oʩ����ͣ܇�T���@ʾ�����֙C���š����W����ͨ�_�������Ԓ�ȷ��՛]���_ͨ��ϵ�y�OӋ�ķ��շ���������܇λ��Ϣ��ͣ܇���ֲ���λ����Ϣ��ͣ܇�����M��r��ͣ܇�������_�ŕr�g�ȣ���Ŀǰֻ�ṩ܇λ��Ϣ�ͺ��ε�λ����Ϣ�����⣬Ŀǰ�ܶ���С��ͣ܇��߀�]���F��ӻ��������@Щͣ܇���Ŀ�܇λ�YԴ�o���{��o��ͨ��ϵ�y�Ĺ�����
����ᘌ����y��ͣ܇�T��ϵ�y���ڵĆ��}���������ìF�е��YԴ�������µ���Ϣ�����g����o��ͨ�ż��g��GPS�ƄӽK�˼��g��GIS���g�C�ϑ����ڳ���ͣ܇λ�IJ�ԃ���A���͌��������ϣ����̶ȵ����ìF�е�ͣ܇λ�YԴ���e����Щ��ɢ����С��ͣ܇�����YԴ��ʹͣ܇λ��Ϣ�܉���ͣ܇λ�YԴ��ͣ܇λ����Ĺ����p���õ���Ч�ͺ��������ã������·���������Ƴ��н�ͨ���@��ʮ�ֱ�Ҫ��
����3.ͣ܇�T��ϵ�y(PGIS)�ЄӑBͣ܇·���T��
����ͣ܇�T��ϵ�y(PGIS)�������\ݔϵ�y��ITS����һ���֣������ӑB�T�������ӑBͣ܇��λ�T�����ӑB·���T�������{�T��ij��λ�ðl��Ŀ�ĵز�ԃ��Ϣ�r,܇�dϵ�y���Ԅ��ь����o��Ŀ�ĵظ�������ͣ܇��λ��һ�Mͣ܇��,���{�T�x���ij��ͣ܇���r,ϵ�y�Ԅ�Ӌ�㲢�o��ԓλ�õ��_Ŀ��ͣ܇����������·����ԓͣ܇����������·���DŽӑB��׃��,��˾�C����һλ��(߀δ���_Ŀ�ĵ�)���˕r˾�C���x���ԃ�������ϴβ�ԃ�x���Ŀ��ͣ܇���ڴ˕rͣ܇λ�ѝM���џo��܇λ����Ŀ��ͣ܇����׃������·�W�ϵĽ�ͨ��r�ѽ��l�����@��׃���˕r܇�dϵ�y�����Ԅӽo���c��ǰ�r��·�W��ͨ��B�����ĵ��_ԓ�r�����xĿ��ͣ܇����������·����
������܇�v��ǰ����λ�õ�Ŀ�ĵز�ՓĿ��ͣ܇���Ƿ�l����׃����ӑB�·���r�̿��ܰl��׃����ϵ�y�����Ԅ�Ӌ�㲢���r�o��˾�C��������������·������ˌ��r·���T��Ҫ������^�ߵČ��r�ԣ��ЕrӋ�������·���������(���·)���H�Ǵ�·��(�ζ�·)�����˕r�ṩ�Ĵ�·��ֻҪ�nj��r�ģ�Ҳ�ܝM���T�����gҪ��
����������ͣ܇�����г̕r�g��ӳ��܇�v���гɱ��Ϳ��_�ԣ��������г̕r�g��̞郞��Ŀ�ˣ�������������·�������BPR·�躯��ģ�ͣ�Ӌ���г̕r�g��ʽ�飺 (1)
�����O���ͣ܇��i��;��m�l·�Σ����ڲ�ͬ��ͣ܇����mֵ�ɲ�ͬ��ʽ(1)�е����P����Ӌ��飺
����(2)
����(3)
����(4)
����(5)
����ʽ�У��������i��ͣ܇��;�е�j·�εęC��܇��ͨ��/(pcu•)���������i��ͣ܇��;�е�j·�εČ���ͨ������/(pcu•)��α��β��ؚw����������С���˷��_�����齻ͨ����0�r�����i��ͣ܇��;�е�j·�ε����r�g���������i��ͣ܇��;�е�j·����������ڵ��g�ࣻr������܇Ӱ��ۜpϵ������ȡ1.0����·���OӋ܇��,ȡ40~60km/h����Ηl܇����Փͨ��������ȡ1500pcu/h���������i��ͣ܇��;�е�j·�ε�܇����Ӱ�ϵ��������1~4�l܇������ȡ1.00��1.87��2.60��3.20���齻���Ӱ�����ϵ�����齻�����Чͨ�Еr�g�ȣ���̖�����̎��ȡ�G�űȣ��������i��ͣ܇��;�е�j·��܇������Ӱ�ϵ������һ�l�C��܇������/m��
����������Ŀ�ĵش_�����{�T���xͣ܇����Ȼϣ���г̕r�g��Ҳ����^����ܵ��{܇�г̕r�g��������ֵ��
����(6)
����4.Λρ�����㷨�Ļ���ԭ��������·���T���ķ���
����4.1Λρ�㷨ԭ��
����ρȺ�㷨(ACO)��һ�N�S�C�����㷨���c����ģ�M�M���㷨һ��,ͨ�^�ɺ��x��M�ɵ�Ⱥ�w���M���^�́팤����⡣�����ڌ���Ȼ�����挍ρȺ�ļ��w�О���о����A�ϣ���������W��M.Dorigo����������ġ���Ȼ����Λρ�ڌ�ʳ�^���У����������^�ĵ�·������һ�N�Q֮����Ϣ�صļ��أ�����Λρ���Ը�֪�@�N���ز��Դ�ָ�����\�ӵķ����@�N��Ϣ�����S�B�ӣ����^ͬһ�l·����Λρ����Խ�࣬�@�l·���ϵ���Ϣ�؝��Խ��Ҳ����������Λρ�Ը���ĸ����ߴ�·������֮�����^��ΛρԽ�٣���Ϣ�؝��Խ��,����Λρ�ĸ���ԽС��ͬ�r���@�N��Ϣ��߀���S���r�g�����ƶ��]�l���@�N�F��Q֮��������ԭ����Λρ�㷨���ǻ����@�N�������C�ưlչ�����ġ�Λρ�㷨��˼���ǣ������˹�ΛρȺ�w��⣬ÿ��Λρ���w���к��ε��Д������;ֲ�����Ҏ�t��ͨ�^ጷź�̽�y��Ϣ�صķ�ʽ������ΛρȺ�w���^һ���r�g���ԽM����Ӻ�څ����⡣һ�����OӋΛρ�㷨�r�����OΛρ���w֪�������������c�c���ľ��x����ֲ�����Ҏ�t�ǣ�Λρ�ȿ��]��һ��·���L�ȣ�Ҳ�����]����Ϣ�صķֲ����ȣ����������c����һ���ĸ����x����һ���_���c�����磬��t�r��·��(i,j)�ϵ���Ϣ�؏��Ȟ飬�t��kֻΛρ��i�c��j�c�D�Ƶĸ��ʱ�ʾ�飺
������7��
����ʽ�У�allowed��ʾΛρk��һ�����S�x���c���醢�l����,����_ʽ��=1/����ʾi��j�ɂ����c֮�g�ľ��x���c��������С�Q����Λρ��·����Ϣ�غ��|����ȡ��ƫ�á���Λρ�D�Ƶ�j�c�r����allowed��������
����Allowed=allowed-{j}(8)
������Λρ���һ�έh�Σ���Ϣ���������{����
����(t+n)=(1-)+(t)(9)
����(t)=(10)
��������,��С��1�ij�������ʾ܉�E�ij־��ԣ�1-��ʾ܉�E˥�p�ȣ�����Ϣ�����ų̶ȡ�(t)��ʾ����ѭ�h��·��i��j�ϵ���Ϣ����������(t)��ʾ��kֻΛρ�ڱ���ѭ�h������·��i��j�ϵ���Ϣ����(t)��ȡֵʹ��M.Dorigo�����ant-cyclesystemģ���е�ȡֵ����������
����(11)
�������У���һ��������������Ϣ�؏��ȣ���ʾ��kֻΛρ�ڱ���ѭ�h�����ߵ�·���L�ȡ��ڳ�ʼ�r�̣�(0)=������(t)=0(i��j=1��2��…��n)���@�ӣ���ÿ�Ό���^���У�ÿֻΛρ������ʽ(7)�xȡ·��������ÿ�Ό��Y����ÿֻΛρ�xȡ�ĽY����ͨ�^ʽ(8)��ʽ(9)��ʽ(9)��ʽ(10)�����oʽ(7)��������һ�Ό��Λρ�xȡ·�����������@���ǻ���Λρ�㷨��·�������^�̡�
����4.2ρȺ�㷨���T��ϵ�y�еđ���
��������ϵ�y��һ����Ҫ�Ĺ���ģ�K���nj�܇�v�·���ķ��������Ľ�Bһ�N����ϵ�y�л���ρȺ�㷨�����·���㷨���ڌ���ϵ�y�Ќ���·�ĸ�헷����ǻ�����ӵ؈D��ʽ�ģ�����ӵ؈D��Ϣ�����Ԙ��������DG(V��E)��V=(����…��)�ǽ�ͨ�W�j�е���c������������ͨ�W�j�е����нY�c���ϡ�E=(i��j=1��2��…��n)�ǽ�ͨ�W�j�е�����߅������������ͨ�W�j�нY�c�g���B�Ӿ������з���ģ������ďĽY�c����·�����x��������ӵ؈D����̶��Ĵ惦ģʽ��ͨ�^GPS�l�Ƕ�λϵ�y���_���ø����Y�c��λ�ú��Ժܷ����Ӌ������c֮�g���x���õ�·�ξ��x�����ھ��w�Č����^���м���·�r���r��Ϣ���õ��l���s�����£�
�����ٮ����x���·����������·�Σ�����ij·�ΰl���˽�ͨ�¹ʶ���ɽ�ͨ�����r����·����Ϣ���б�ʾԓ·�ε�����߅�Ğ��ֹͨ�У�����܇�v�x���·�η���
���������ڲ�ͬ��·�ϵ�܇�v���̶ܳȲ�ͬ������ͬ��܇�v�ܶȌ�܇�v��������ܴ��Ӱ푣������������ɼ��Ľ�ͨ��Ϣ���_��܇�v�ij��̶ܳȣ���ÿһ·�μ����·����ϵ��(t)������Λρ�Ĺ��ci�x����һ���cj�ĸ��ʞ飺
������12��
�������x(t)��Ӌ��ʽ�飺
������13��
����(t)��ȡֵ����ԓ·�ή�ǰ܇�v��Q(t)������·���L�ȡ�܇����n��ƽ��܇��v(t)���_�����������������x����ÿ��λ܇���L��܇���ܶȴ�С����Ϣ��(0)���²�ȡʽ(9)��ʽ(10)���@�ӣ��S��Λρ���^�ĴΔ����ӣ������ҵ��˕r�˿�ͨ��Ŀ�ĵص��·����
����5.���挍�
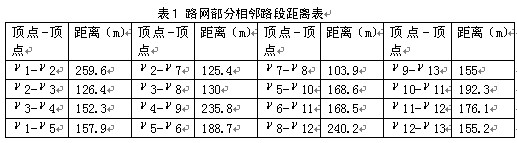
�����o��һ��·�W(���D��ʾ)�����o����������·���g���x����1��ʾ�������{�T�����c���K�c��ͣ܇��������̕r�g�ȵ��_Ŀ�ĵص��·����
����
�����O��Λρ��Ŀ��10��=1��=2��=0.3��ƽ��܇��ͨ�^�����P·�εĽ�ͨ�{��@�ã����ɽ�ͨ�{��@ȡ���r��ͨ��Ϣ������Y���飺→→→→→�����x��846.4m��ƽ�����_�r�g��5��47�롣�mȻΛρ�㷨�ҵ��IJ�������̵�·���������]�����r�Ľ�ͨ��Ϣ����܇�v���·���M�����^�õ��T����ʹ���܉����^�̵ĕr�g�ȵ��_Ŀ�ĵء�
�����������oʾ��·�W���^���Σ��\��Λρ�㷨�܉�ܿ��ҵ��·������·�W���^���s�r�����r�ӑB��ϢҲ���^���s��������Ҫ��Ķ̕r�g���ҵ��IJ������·�������������ԣ����^�ٵ����Δ���r����������·��Ҳ�܉�M������
����6.�YՓ
���������ڷ���Ŀǰͣ܇�T���F��Ļ��A�ϣ����܇�d�����ĄӑBͣ܇�T�����C������GPS�͵�·���r��ͨ��Ϣ���ڴ_��ͣ܇���Ļ��A�ϣ��\��Λρ�㷨��܇�v���l�غ�Ŀ�ĵ�֮�g�M���·���T�����Ķ����{�T�ṩ���_ͣ܇�����·��������һ���^�麆�ε�ʾ��·�W�M����Փ�C�f����
���������īI��
����[1]��Թ⣬Ѧ��������.����ͣ܇�T����Ϣϵ�y�OӋ[J].��ͨ�\ݔϵ�y�����c��Ϣ��2004��4(1)��93~96.
����[2]껝�.ͣ܇�T����Ϣϵ�y—ITS��ͣ܇�I��đ���[J].���·��2000��20(2)��4~6.
����[3]�w�G��.����¡��ͣ܇�T��ϵ�y[J].��������Ҏ����2002��(3)��45~46.
����[4]�����£��S�G����ꐾ���.�������õ��O��ǰ��o�۞�����ͣ��վ�����о�[J].��·��ͨ�Ƽ���2004��21(7)��103~107.
����[5]�����£�ꐾ�������.����ͣ܇�OʩҎ�����u�к����Q�߷���[J].��ͨ�\ݔ���̌W����2004��4(4)��53~57.
����
������Փ��֪�R�W�����ڞ���Ҫ����Փ�ĵ���ʿ�ṩ���P����,�ṩѸ�ٿ�ݵ�Փ�İl��������ָ���ȷ��ա����w�l�����̞飺�͑���ԃ→�_���������͑�֧������→���°l�Ͳ��l��→�͑��������֪ͨ��֧�����→�s־���沢���Ϳ͑�→�͑��_�J�յ����Q�Wϵ�W�g�Wվ������Ͷ����o���֧�����x�^�njW�g����Ͷ�f������
�����}������ͣ܇�T��ϵ�y�ЄӑB·���T�����g�о�
�D�dՈע�����ԣ�http://www.56st48f.cn/fblw/dianxin/zhineng/4231.html
���P���}���
�zӰˇ�g�I��AHCI�ڿ����]��Phot...�Pע:106
Nature���¶��W���ӿ�Nature Com...�Pע:152
��С�W�̎�ֵ���˽⣬�@Щ�����W...�Pע:47
2025�ꌑ����WՓ�Ŀ����õ�19��...�Pע:192
�y�L�I��Ƽ������ڿ��x�� �p����...�Pע:64
���r�_Փ�ęz���C������Ҫ�Pע:52
�Ї�ˮ�a�ƌW�ڿ��Ǻ����ڿ����Pע:54
���H������Ҫ�˽�Ć��}����Pע:58
���������ܷ��u�Q���Pע:48
��ŌW����Щ��Ͷ���SCI�ڿ���ֵ...�Pע:66
ͨ�Ź����ИIՓ���x�}�Pע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�Pע:121
�u�Q�lՓ�ĺ�߀�dz������Pע:68
��ӡ���Y����Ҫ�D�d��Դ�ڿ���...�Pע:51
�����ϢՓ�ķ���
���ܿƌW���gՓ�� �V���ҕՓ�� ��늼��gՓ�� Ӌ��C��Ϣ����Փ�� Ӌ��C�W�jՓ�� Ӌ��C����Փ�� ͨ��Փ�� ��Ϣ��ȫՓ�� ��ӑ���Փ�� ��Ӽ��gՓ�� �����t�W����Փ�� ܛ���_�lՓ��

SCI�ڿ�����
- MEASUREMENT SCIENCE and TECHNOLOGY�п�Ժ�օ^
- MEAT SCIENCE�ڿ������п�Ժ�օ^
- MECCANICA�п�Ժ�ׅ^
- MECHANICAL ENGINEERING�п�Ժ�օ^
- MECHANICAL SYSTEMS AND SIGNAL PROCESSING�ڿ������п�Ժ�օ^
- MECHANICS OF MATERIALS�ڿ������п�Ժ�օ^
- Mechanics of Solids�п�Ժ�օ^
- MECHANICS OF TIME-DEPENDENT MATERIALS�ڿ������п�Ժ�օ^
- MECHANISM AND MACHINE THEORY�п�Ժ�ׅ^
- MECHATRONICS�s־���п�Ժ�ׅ^