�ߌӽ������w늄�(d��ng)����ʩ�����g(sh��)
���ٙ�Ŀ�����Փ�� �l(f��)�����ڣ�2010-12-23 17:16 ��ȣ�
����ժҪ�����ܼ��g(sh��)�ȳ�Ҏ(gu��)ʩ���Ę�(bi��o)��(zh��n)Ҫ��ߺܶ࣬�ͺ��y�M��͌�(sh��)�F(xi��n)���@��(du��)���C�����|(zh��)����ԓ���g(sh��)���ƏV��(y��ng)�Î��������y�����ĽY(ji��)�ό�(sh��)�H���̣���B�����w늄�(d��ng)����ʩ�����g(sh��)�ڸߌӽ����еđ�(y��ng)�ã���Ԕ��(x��)��B��ʩ����ˇ���|(zh��)�����ƴ�ʩ��
�����P(gu��n)�I�~���ߌӽ��������w늄�(d��ng)���ܡ�ʩ����ˇ
����
����1���̸śr
�����V��ȫ��ͨ��B������ס�k���ǣ���34�ӣ�������2�ӣ�ȹ��4�ӣ�5��31�Ӟ��k���ǣ�32��34�Ӟ���픙C(j��)������B��������ǵĵ�����_ʼ���������w늄�(d��ng)�������ܡ�������䓹ܿۼ����O(sh��)���ČӰ�߷��]ʽ�����_�ּ�ϵ�y(t��ng)��������ܡ��������U���B����˨�M�ɵij���ϵ�y(t��ng)���Լ�늄�(d��ng)���J���������_(t��i)�M�ɵ�늿�����ϵ�y(t��ng)�@���֘�(g��u)�ɡ�����ʹ��26��(g��)늄�(d��ng)���J�������O(sh��)�䣬�g��4000��7000mm����С�g��λ��ƽ���D(zhu��n)�Dz�λ�����λλ�������ּ�̎�����ܿ���18.6m����13���ܽM�ɣ�ÿ���ܲ���1.4m����ͬ�r(sh��)�M��4��(g��)��(bi��o)��(zh��n)�ӽY(ji��)��(g��u)ʩ�������b����Ҫ�����һ���ܸ߳����I(y��)��һ���ܣ��ԝM��Y(ji��)��(g��u)ʩ���İ�ȫ���o(h��)Ҫ��
����2ģ������ԭ��
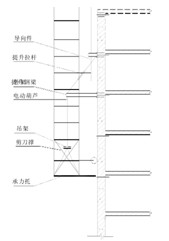
�������w���ܹ�ˇԭ���������Ò����c�Y(ji��)��(g��u)���B�Ę�(g��u)���ϵ�늄�(d��ng)���J��������w��������������(g��)��ܺ��Ƹߌӽ�������Ȧ���(d��ng)���@���_�ּܴ��O(sh��)4�Ӱ�ߣ����w����һ��������(g��)���w�ij�����ܣ�������ܳ����ϲ����w���µ�ȫ�����d�������������o�ײ��ij����С���(d��ng)����̎�ڹ̶���B(t��i)�r(sh��)��������ͨ�^б���U�c�����ݗU���������o�����Y(ji��)��(g��u)����(d��ng)����̎��������B(t��i)�r(sh��)��������ͨ�^늄�(d��ng)���J������������������U�c�����ݗU���������o�����Y(ji��)��(g��u)��늄�(d��ng)���J�Ғ�����������ϣ�����������t���������U�ʹ����B����˨�̶��ڽ������ϣ�늄�(d��ng)���J���w���������У�����(d��ng)������������(d��o)��݆�͌�(d��o)��U������ֹ��܃Aб��������ֱ������(d��o)�����á��������U���g�O(sh��)�����{(di��o)��(ji��)�ݗU���{(di��o)���������U�L�ȡ��������U���������U����A3�A䓣�ֱ���քe��Φ25��Φ32��������˨M25��45̖(h��o)䓣������ܲ���14̖(h��o)����䓡�
������D1��a����ʾ���ڸ��(xi��ng)��(zh��n)�乤��ȫ���;w���ڙz��ϸ��ǰ���£�����(d��ng)늄�(d��ng)���J�����J朗l̎��������B(t��i)���Ʉ�(d��ng)��Ó�_�²��������U�������к��R�r(sh��)�̶�����ʹ���܃H���ϲ���(d��o)��U���²���(d��o)��݆���������J�c���������B�ӡ�늿ع�����ˆT��“����”���o��ȫ��늄�(d��ng)���Jͬ�r(sh��)����(d��ng)������(d��ng)���w�����100mm/min���ٶ��ڌ�(d��o)��U�ļs������������D1��b������������λ���������������U�������к��R�r(sh��)�̶����c�������������˨���ɿ��̶���ͬ�r(sh��)��䓹ܿۼ�������c�������(n��i)֧�����ӷ�(w��n)�̡����ք�(d��ng)���J�������픲��c����ϵ�y(t��ng)����(du��)��(y��ng)�ļӏ�(qi��ng)��λ���ք�(d��ng)�������ҵ�����������������U��늄�(d��ng)���J����(d��o)��U������һ������(y��ng)�̶����ȴ���һ������������D1��c������
���������½���������(d��ng)늿ع�����_(t��i)“�½�”���o�⣬������(zh��n)�乤������(sh��)ʩ���E������Ҫ���c������ͬ��
�� ��
��

������a������ǰ ��b�������� ��c��������
�����D1�����������D
����3����ʩ��
����3.1���bǰ�Ĝ�(zh��n)�乤��
������1����ƽ��D�ȴ_�������м�늄�(d��ng)���J�������b��λ�ú͂�(g��)��(sh��)��������(y��ng)λ���ϵĻ�������������(n��i)�A(y��)����˨���A(y��)��������˨�Ŀ��ۡ����ӵ���˨λ��Ҫ��������һ�£��`����^+10�L��
������2���ӹ�������䓳����С�������б���U����(zh��n)��늄�(d��ng)���J��䓽z�K���_�ֹܡ��ۼ�����ȫ�W(w��ng)��ľ��Ȳ��ϡ�
������3�������w�����_�ּܵĸ߶Ȟ�4��(g��)��(bi��o)��(zh��n)�ӌӸߣ����������ȹ�njӸ������c��(bi��o)��(zh��n)�Ӹ߲�һ�£�����һ���ڽ��������wʩ����ȹ��픕r(sh��)���_ʼ���b�����O(sh��)�����_�ּܡ��˕r(sh��)Ҫ����ȹ��피�̎��䓹���ƽ�����O(sh��)���ܵIJ���ƽ�_(t��i)�����鰲�b�������ӳ����кʹ��O(sh��)�������ӵIJ����档
������4��Ҫ���g(sh��)�ˆT�����Ϥ���ܵ��O(sh��)Ӌ(j��)�D�����b���������ռ��g(sh��)Ҫ�I(l��ng)����ܴ��O(sh��)���I(y��)�ľ��wҪ���M������ȫ�w�����ˆT�M(j��n)��Ԕ��(x��)�ļ��g(sh��)����ʾ�����b�����������ˆT���������Д�(sh��)���������w�����O(sh��)Ӌ(j��)�D��(du��)��ӆُ�ͼӹ��IJ����M(j��n)��������������(du��)ُ����(sh��)����������|(zh��)��ȫ��z�飬�|(zh��)������Ҫ��ģ��ڬF(xi��n)��(ch��ng)��ѷš�Ԕ��(x��)��x���P(gu��n)늄�(d��ng)���J�����Ŀ��ƹ��ʹ���f��������������ϵ�y(t��ng)����ԭ�����\(y��n)�г����ڵ����ό�(du��)늄�(d��ng)���Jͨ늙z�y(c��)������Ҫ����M(j��n)�����_(t��i)��̖(h��o)�������O(sh��)Ӌ(j��)Ҫ���c���Ŀ��ƹ�ȫ���B��ͨ��M(j��n)��ϵ�y(t��ng)�z�(y��n)���_�J(r��n)ͬ�����_(d��)���O(sh��)Ӌ(j��)Ҫ��
����3.2���w���ܵİ��b
����3.2.1�_�ּܰ��b
�����������A(ch��)�ܣ�������ͨ䓹ܴ��O(sh��)���A(ch��)�ܵ�ȹ��픲�(��oȹ���t�������)�����A(ch��)�ܼ��w�c��ͨ���Ҫ��o����ֻ�Ǽ��(xi��ng)��(y��ng)�������ܰ��b�����ƽֱҪ��
�����ڻ��A(ch��)��픰��b�����У������Ѓ�(n��i)��(c��)��φ25��30�L����˨�c������߅���̶������������(c��)��б���U�c�ό�߅�����Y(ji��)�̶�����б���U�в��Ļ��@��˨���������{(di��o)ƽ��
�����ڳ�����������O(sh��)���ӣ����Q�������ϵ����U��Ȼ����O(sh��)����һ���ij�����ܣ�������ҹܵĽ��^���ý��^�ۼ��B�ӣ������ܺɺ���^̎��(hu��)���_������Îͺ�䓽��B�ӡ����O(sh��)�r(sh��)������������ҹ����g��3cm��������܃�(n��i)�ĸ��U�������p�ܡ�
�����ڱȳ����и�2�ӵ���ͬλ�ð��b����������������c������߅�����B�ӷ����c��������ͬ��늄�(d��ng)���J���������¡���늄�(d��ng)���J�ĵ��^���ڳ����еĻ��@�����ϡ�
�����ڼ��w��䁰壬ÿ��(g��)�ӸߝM�һ�ӣ����ú�s30�L���p�|(zh��)ľ�塣���w����M��С�۾W(w��ng)��С�۾W(w��ng)��(y��ng)�ļ��w�ײ����M��λ��늄�(d��ng)���J����̎2��(g��)��Ԫ���Ӵ��̎�����řM�U��(y��ng)ʹ�ö̹ܣ������r(sh��)���r(sh��)����з��K�Ď���������ͨ�^���������B�ӡ�
�������b�r(sh��)ע�⌢���U�Ľ��^λ���e(cu��)�_(�v����(n��i)�����U��Ҫ�e(cu��)�_)����һ�ӿ���3m��6m�����U�e(cu��)�_���á�
����б�κ��B�ӓ��Լ��ֲ��ӏ�(qi��ng)�U���O(sh��)Ӌ(j��)Ҫ���b���_�ּ܃�(n��i)�O(sh��)�����R���������I(y��)�ˆT���½Y(ji��)��(g��u)ʩ�����ṩ���㡣���O(sh��)��(d��)������ƽ�_(t��i)��ͨ�^䓹�б�κ�䓽z�K�������Y(ji��)��(g��u)���ϣ����w���������r(sh��)���ɸ���������S֮���������ÿۼ�䓹��ڼ��w����O(sh��)����������g�����ڰ������Ŀ��ƹ�Ҫ��ԓ�����g�ܷ������
����3.2.2����ϵ�y(t��ng)���b
������ÿ�ӻ��������������A(y��)������䓳����ܡ��������U�ͳ������U�����Φ40��˨�ס���ģ�����������������C������˨������^�����ΰ��b���F���Ĵ�����˨���̶��ó����֧�����������U�֧��̎��������������(qi��ng)�ȑ�(y��ng)�_(d��)15��20MPa��
�����̶��ù���䓳����ܡ��������U���������U�����b�ϵ��ܡ���(d��o)��U��֧�����ٰ��b�����g�M�U���R�r(sh��)�̶�����
��������늄�(d��ng)���J��늄�(d��ng)���J��̖(h��o)�c���Ŀ��ƹ�΄�(d��ng)���o��̖(h��o)��회�(du��)��(y��ng)һ�£�늄�(d��ng)���J�c����λ��̖(h��o)Ҳ��(y��ng)��(du��)��(y��ng)һ�¡�늄�(d��ng)���J��朗l��(y��ng)�c���洹ֱ�����S�з�朡�Ť���ȬF(xi��n)�����朗l�ϵ���������坍��Ϳ�����C(j��)�͝���������(du��)늄�(d��ng)���J���O(sh��)���֡�
���������Ŀ��ƹ��b������������g�������O(sh��)Ӌ(j��)Ҫ���B��늿�ϵ�y(t��ng)��늄�(d��ng)���J��늙C(j��)�c���ƹ��g��������1m�O����|���B�ӣ����ƹ��Դ��������16m�O����|����Ҫ���L��Ҫ��������w�����������c(di��n)��
����3.3���w������������
������1���z��늄�(d��ng)���J�Ƿ���ף������Ƿ��b�ι̡��c(di��n)��(d��ng)���J�����o朗l�z����J��ʹȫ�����J̎��ͬһ�߶ȵ������������\(y��n)�Р�B(t��i)��
������2���������w�����л���d��ʩ�����d�����_���w�c������Ĺ̶����Y(ji��)�c(di��n)���˕r(sh��)����(d��ng)���Y(ji��)�c(di��n)�������ã������_�������c���������B����˨��б���U���^����ӵķ�(w��n)����B(t��i)���z�������c������֮�g�Пo��������ײ����|���@�r(sh��)�����܃H��늄�(d��ng)���J����(d��o)��U����(d��o)��݆����������c�������B�ӻ���|��
������3�����w���ܹ����ˆT����λ����ָ�]�l(f��)��������������Ŀ������_��(d��ng)늄�(d��ng)���J��ʹ���w�����100mm��min���ٶ�������ע���^���_�ּܵ�������r�����ЃAб������J朗l�����߶Ȳ�һ�r(sh��)�������l(f��)����̖(h��o)ֹͣ��������(du��)��ͬ���Ă�(g��)�e���J�c(di��n)��(d��ng)̎��������ͬһ��(g��)ˮƽ��(bi��o)�ߺ����^�m(x��)ͬ��������(li��n)�j(lu��)��ʽ�ɲ��ô��ڣ�Ҳ�ɲ��Ì�(du��)�v�C(j��)��
������4�����w����������λ���������������U�ͳ������c�������A(y��)��������U�ɿ��̶���ͬ�r(sh��)����䓹ܿۼ�������c�������(n��i)֧�����Y(ji��)��(w��n)�̣���(d��o)���Ҳ������һ�Ӳ�����(y��ng)�̶���
������5�����w���ܾ�λ������(g��)�z�鲢�_�J(r��n)ÿ��(g��)�������U̎�ھ���������B(t��i)����(d��o)����̶���(d��ng)������늄�(d��ng)���J���Â�����机��J���^�ص��O(sh��)����������һ�Ӿ�λ�̶����ȴ���һ��������ƽ�r(sh��)��늄�(d��ng)���J朗l�����Y��B(t��i)��
������6�����w�����½�������늄�(d��ng)���ƹ����“�½�”���o�⣬������(zh��n)�乤������(sh��)�H���E�Ͳ���Ҫ���c������ͬ���������Ƅ�(d��ng)һ�Ӿ��Ğ������Ƅ�(d��ng)һ�ӡ�
������7��ÿ������������������I(y��)ӛ䛣�����ӛ������^�����O(sh��)�䡢���w����r���\(y��n)���^���Пo�����F(xi��n)��ȫ��r�ȡ�
������8����ܽ�����ʹ���ꮅ���Ȳ�������b�ã������϶��������ܣ����������c���bǡ���෴��
������9��������������ݲ�����������(c��)�����Д����w��ܣ����O(sh��)��ĸ����������������r(sh��)����档�������r(sh��)�������Ӱ푵���ܙM�U�������e(cu��)λ�O(sh��)�ӏ�(qi��ng)�U������������ɺ��ٻ֏�(f��)��������ܵ����w���ȡ����Ͼ��ּ�һ����ÿ������ã����w����ڴ�̎�Д࣬�������]̎����
����3.4�����|(zh��)��Ҫ��
�����������U��ֱ�ȑ�(y��ng)������1/400�ԃ�(n��i)��ÿ��ܙM�Uˮƽ�߶Ȳ�С��50mm��������L����ƽֱƫ�����20mm������(����)�A(y��)���ף���(y��ng)�����w�����O(sh��)Ӌ(j��)ƽ�桢����λ�Ü�(zh��n)�_�A(y��)��������ˮƽ���x�`�(y��ng)������4mm�ԃ�(n��i)����(n��i)���U���b���x����ľ��x�`�����20mm��
������ӹ��Ę�(g��u)����������˨������䓡���䓡�䓰��������ͨ��܈䓡��ӹ����P(gu��n)�I�������|(zh��)���������p����M�������p�����6mm���ϣ����Ӻ��ú��p�dz��M(j��n)�Йz�飬������Ҫ���Ҫ�M(j��n)���a(b��)�������p����A�к��������Ҫ����غ����P(gu��n)�I�������p��횽�(j��ng)̽���z��ͺ��dԇ�(y��n)�ϸ����ʹ�á�
��������ܰ��b�^���У��S���b�߶����ӣ�횲�ȡ�R�r(sh��)�O(sh��)ʩ��������c�����ﷀ(w��n)���B�ӣ�ͬ�r(sh��)������c������֮�g���b�÷�(w��n)�̌�(d��o)���b�ã�����(d��o)����c��(d��o)���֮�g���x��(y��ng)����һ�¡�
����3.5���ܰ�ȫע�����(xi��ng)
������1����������(���½�)�r(sh��)���������܇�15m������(n��i)��(y��n)��վ�ˣ����O(sh��)���˱O(ji��n)�o(h��)�������^���У�����ϳ����Ŀ��ƹ�����ˆT�⣬�����������ˆT����(y��n)��ʩ���ˆT�������ϼܡ�
������2�������^���У���횰������(sh��)���Ĺ����ˆT���^��ÿ��(g��)늄�(d��ng)���J�Ĺ�����r������c������֮�g��r����l(f��)�F(xi��n)늄�(d��ng)���J��ͬ���������Լ��������ϣ���횰l(f��)����̖(h��o)ͣ�C(j��)��
������3����������֮ǰ��회��܃�(n��i)�����s��(����Сʯ�ӡ�ľм�Ƚ�������)�����Ƀ�����ֹ�\(y��n)��������(d��ng)�����ˡ�
������4���O(sh��)�÷������U(xi��n)�b�ã�����5t�ք�(d��ng)���J���ڽ������ϣ����^�c늄�(d��ng)���Jͬ�r(sh��)˩ס���ܣ���늄�(d��ng)���J�����r(sh��)ͬ�r(sh��)��朻��朣���ֹ늄�(d��ng)���JʧЧ�������U(xi��n)���á�
������5�������gЪ(���һ���������½�)�����O(ji��n)�ˆT��(y��ng)�z���Դ����늄�(d��ng)���J�����Ŀ��ƹ�^����©늺͙C(j��)еĥ�p�Ƞ�r�����r(sh��)���B(y��ng)�S����Q�й��ϵ��㲿�������{(di��o)ԇ���������ܠ�B(t��i)��ͬ�r(sh��)����(y��ng)�z�������ۡ��ۼ�������ϵ�y(t��ng)�ĸ��N��(g��u)�����B���Пo�Ʉ�(d��ng)��׃�κ�ʧЧ���l(f��)�F(xi��n)������(y��ng)���r(sh��)�S�ޡ����Q���_�����w���ÿ��(g��)��(ji��)�c(di��n)�B�ӿɿ������I(y��)��ȫ��
������6����(du��)�����Ŀ��ƹnj��I(y��)���g(sh��)�ˆT�����S���ж����QԪ�������{(di��o)���·�������������\(y��n)�У���(y��ng)Ո(q��ng)����S�����˙z�ޡ�
������7�����Ŀ��ƹ�(y��ng)�пɿ����ӵش�ʩ�����c늄�(d��ng)���J���B����(y��ng)������пɿ��^�������ƹ�������O(sh��)����������ƹ�����ˆT�����ʽ���C늹���(d��n)�Σ��S��y��늹����ߣ��x�_�����_(t��i)ǰ�ֱ����Д��Դ�����i�ÿ��ƹ��T��
������8��ҹ�g��Ҋ�Ȳ����������⣬�弉(j��)�L(f��ng)�����Ϛ���ֹ�������ܡ�
������9��늄�(d��ng)���J�Ϳ��ƹ�ж�º�(y��ng)���Ʊ��ܣ��������ꡢ������������Ⱦ���ٴ�ʹ��ǰ��(y��ng)����ȫ��z�顣
����
���������īI(xi��n)��
����[1]�μt��.���ߌӽ������w�������_�ּܵ��O(sh��)Ӌ(j��)�cʩ��[M].�������g(sh��)��2005���8��,P27-29.
����[2]�����.�\Մ����ģ��ˇ�ڸߌӽ���ʩ���еđ�(y��ng)��[M].ʩ����I(y��)������2006���1��,P120-122.
����[3]�н����ֱ����Ϸ�������˾.�����̘I(y��)��BҺ����ģʩ��[M].ʩ�����g(sh��)��1995��6��,P16-18.
����[4]���A���͇����Ҙ�(bi��o)��(zh��n).Һ������(d��ng)ģ��ʩ�����g(sh��)Ҏ(gu��)�̣�GBJ113-87��[S].�������Ї��������I(y��)�����磬1999��,P96-97.
����(bi��o)�}���ߌӽ������w늄�(d��ng)����ʩ�����g(sh��)
�D(zhu��n)�dՈ(q��ng)ע�����ԣ�http://www.56st48f.cn/fblw/ligong/dianli/6066.html
���P(gu��n)���}���
�zӰˇ�g(sh��)�I(l��ng)��AHCI�ڿ����]��Phot...�P(gu��n)ע:106
Nature���¶��W(xu��)���ӿ�Nature Com...�P(gu��n)ע:152
��С�W(xu��)�̎�ֵ���˽⣬�@Щ�����W(xu��)...�P(gu��n)ע:47
2025�ꌑ����W(xu��)Փ�Ŀ����õ�19��(g��)...�P(gu��n)ע:192
�y(c��)�L�I(l��ng)��Ƽ������ڿ��x�� �p����...�P(gu��n)ע:64
���r(sh��)�_Փ�ęz���C������Ҫ�P(gu��n)ע:52
�Ї�ˮ�a(ch��n)�ƌW(xu��)�ڿ��Ǻ����ڿ����P(gu��n)ע:54
���H������Ҫ�˽�Ć��}����P(gu��n)ע:58
���������ܷ��u(p��ng)�Q���P(gu��n)ע:48
��ŌW(xu��)����Щ��Ͷ���SCI�ڿ���ֵ...�P(gu��n)ע:66
ͨ�Ź����ИI(y��)Փ���x�}�P(gu��n)ע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�P(gu��n)ע:121
�u(p��ng)�Q�l(f��)Փ�ĺ�߀�dz������P(gu��n)ע:68
��(f��)ӡ��(b��o)���Y����Ҫ�D(zhu��n)�d��Դ�ڿ���...�P(gu��n)ע:51
Ӣ���ڿ����峣Ҋ��Փ�Ġ�B(t��i)����...�P(gu��n)ע:69
Web of Science ���ĺϼ��ڿ��u(p��ng)��...�P(gu��n)ע:59
����Փ�ķ���
�����O(sh��)Ӌ(j��)Փ�� ����Ҏ(gu��)��Փ�� �V�I(y��)Փ�� �C(j��)�һ�w��Փ�� ���bՓ�� ��ͨ�\(y��n)ݔՓ�� ����Փ�� ���Փ�� ˮ��Փ�� �Ԅ�(d��ng)��Փ�� ܇�vՓ�� ұ��Փ�� ���I(y��)�O(sh��)Ӌ(j��)Փ�� �C(j��)еՓ��

SCI�ڿ�����
- MEASUREMENT SCIENCE and TECHNOLOGY�п�Ժ�օ^(q��)
- MEAT SCIENCE�ڿ������п�Ժ�օ^(q��)
- MECCANICA�п�Ժ�ׅ^(q��)
- MECHANICAL ENGINEERING�п�Ժ�օ^(q��)
- MECHANICAL SYSTEMS AND SIGNAL PROCESSING�ڿ������п�Ժ�օ^(q��)
- MECHANICS OF MATERIALS�ڿ������п�Ժ�օ^(q��)
- Mechanics of Solids�п�Ժ�օ^(q��)
- MECHANICS OF TIME-DEPENDENT MATERIALS�ڿ������п�Ժ�օ^(q��)
- MECHANISM AND MACHINE THEORY�п�Ժ�ׅ^(q��)
- MECHATRONICS�s־���п�Ժ�ׅ^(q��)