���I�C���˙Cе�Y��ģ�K���OӋ
���ٙ�Ŀ���CеՓ�� �l�����ڣ�2019-08-05 10:23 ��ȣ�
����ժҪ���ڌ����I�C�����M���Ј��{�顢���ܷ����Ļ��A�ϣ����C�����M��ģ�K���֣������I�C���˷֞�4�Nͨ��ģ�K���քe�Lj�����ģ�K���@z�S���D��ģ �K���@x (y)�S���[��ģ�K������ƽ�_ģ�K���@4�Nģ �K�g����3�Nͨ�õĘ˜ʽӿڡ��Ñ��OӋ�C���ˮaƷ�r��ֻ��Ҫ�������H���r�x����m��ģ�K�N����˜ʵķ�ʽ�M��ģ�K�b�䣬������əC�����OӋ���O�������˹��I�C���˵��OӋЧ�ʡ�
�����P�I�~���C����;ģ�K���OӋ;�˜ʽӿ�
����0 ����
����“�Ї�����2025”�����Ҫ���@���I�C���˵đ���Ҫ�e�O�аl�®aƷ�����M�C������˜ʻ���ģ�K������lչ���U��C���˵��Ј����á��� �� �y��δ ��30��C���˼��g��̎�ڸ������L�A�Σ����m�����Ѹ��׃���� �� �� �h �� �� �� �I �C �� �� �� �� �� �� �� �� �� ����[1]����Ŀǰ���I�C�����OӋ�����L���ɱ��ߣ�ÿ�N�C�� �� �� �� �� �� �� �� �� �ޣ��y �� �m �� �� �� Ҫ �� �� �� ��׃�������Q�������}�����һ�N���I�C���˵�ģ�K���������OӋ�������Ñ�ͨ�^ģ�K�x��ģ�K�ߴ�_����ģ�K�b�伴����ɝM�㹤�rҪ��Ĺ��I�C���˽Y���OӋ���OӋ�������Σ��ӹ����ڶ̣��aƷ�|���ߣ��S�o���B���㣬�aƷ�ɱ��ͣ������^����Ј�����[2]��
����1 ģ�K���ּ��ӿ��OӋ
����1.1 ģ�K���ַ�������Փ�ڌ����I�C�����M���Ј��{���c���ܷ����Ļ��A�ϣ����C���ˮaƷ�ֳ�һϵ������ͨ�õĹ���ģ�K�������xģ�K�Ľӿڼ���ģ�KҪ��ģ�K���֕rҪ���]����������[3-5]��(1)ģ�K���ֵ�ԭ�t���ԱM�����ٵ�ģ�K�M�ɸ���aƷ��(2)ģ�K�Y����������һ���Ī����Ժ������ԡ�(3)���˱��C��ͬ����ģ�K�Ļ��Q�Ͳ�ͬ����ģ�K�ĽM�ϣ�ģ�K�����пɽM���ԺͿɻ��Q�ԃɂ�������
����1.2 ģ�K���ּ���ģ�K���ܱ������P���͙C���˞��о������P���͙C�������B�Uͨ�^�P�������B�Ӷ��ɡ����P���͙C���˷֞�4�N��Ԫģ �K[6-7]����D1�� ʾ���D1�У��s �� ƽ �� �ڙC�����B�U������S��z�S����ֱ�ڙC�����B�U������S��x��y�S��
����1.3 �ӿ��OӋ�C���˸���Ԫģ�K�IJ�ͬϵ��ͨ�^�˜ʵĽӿ��M���B�ӡ��ӿڷN�Ҫ�M�����٣��ӿڵ��B��Ҫ���Ρ��������ɿ����Ա���ģ�K֮�g�Ŀ��ٽM�ϡ����ڴˣ��OӋ����D2��ʾ��3�N�ӿڡ��ӿ�һ�����B�� AB��AD��BB;�ӿ� �� �� �� �B �� AC��BC��CC;�� �� �� �� �� �B ��CB��BD��CD��
����2 ���I�C����ģ�K���������OӋ�Č��F
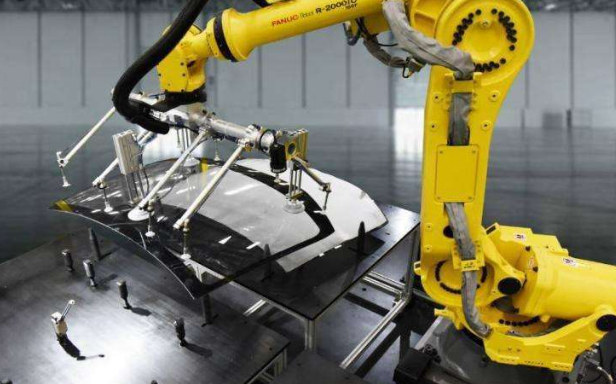
����2.1 �C����ģ�K�����������F�����M�ЙC����ģ�K���������OӋ�r���Ñ��ȸ������H���r�_��ģ�K�N��������b�䷽ʽ������헴_���C���˸�ģ�K�ijߴ煢�����Ķ��_���C���˵ęCе���w�Y������ͬ�ijߴ煢����ģ�K�N͔��������Y�����ơ��ߴ粻ͬ�ęC���ˡ��C����ģ�K���������OӋ������D3��ʾ��
����2.2 ���\�C����ģ�K�����������F������ij���r���\�C���˞����M��ģ�K���OӋ��ץȡ������L50mm����60mm����50mm ���L���w���|����0.5kg����Ӌ�㣬�C���˵�������돽��1740mm��
����2.2.1 ���\�C����ģ�K�x�����ɰ��\�΄գ��x��5��ģ�K�M�əC���ˣ��քe�Lj�����ģ�K���@z �S���D�P����2���@x(y)�S�� �[�P��������ƽ�_��
����2.2.2 ���\�C���˅����_���Ĉ�����ĩ���_ʼ���C�����B�U���L�ȷքe��100mm��160mm��250mm��410mm�����xijƷ�Ɯp��늙C�� ̖ �� �e �� 2 �� YN80-40 �� ZL28-0.75-15S��ZF32-0.75-30S��� �C �S �� �� �e �� 10 mm��10 mm��28 mm��32mm��ͬ���������������ԏ�늙C�ӱ��D�в�á�����ƪ�����ƣ��H�г��@x(y)�S���[�P��ģ�K�и��㲿���ą��������1��ʾ��
����2.3 �C���˿��D�OӋ�����C�����㲿���������������M�ɰ��\�C���˸�ģ�K�㲿��(���2��ʾ)�����Sģ�Ͳ�����M�b�əC���˵ĸ���ģ�K���ٌ���ģ�K�b����������K����ض����r�¹��I�C���˵��OӋ�����\�C�����b��D��D4��ʾ��
����3 �YՓ���������һ�N���I�C����ģ�K���OӋ����������C���@�N���I�C�����OӋ�����Ќ����У��������C���˵�ģ�K���OӋҲ����һ���Ľ��b���á�
���������īI��
����[1] �����磬��ٸ.�҇����I�C���˼��g�F���c�a�I���lչ����[J].�Cе���̌W����2014��50(9)��1-13.
����[2] ���O�壬���H��.�C���˼��g���A[M].�� ������ �� �� �� �����磬2006.
�������P���]���Cе���̎��Q��Ҫ��ƪՓ��
�����}�����I�C���˙Cе�Y��ģ�K���OӋ
�D�dՈע�����ԣ�http://www.56st48f.cn/fblw/ligong/jixie/40612.html
���P���}���
�zӰˇ�g�I��AHCI�ڿ����]��Phot...�Pע:105
Nature���¶��W���ӿ�Nature Com...�Pע:152
��С�W�̎�ֵ���˽⣬�@Щ�����W...�Pע:47
2025�ꌑ����WՓ�Ŀ����õ�19��...�Pע:192
�y�L�I��Ƽ������ڿ��x�� �p����...�Pע:64
���r�_Փ�ęz���C������Ҫ�Pע:52
�Ї�ˮ�a�ƌW�ڿ��Ǻ����ڿ����Pע:54
���H������Ҫ�˽�Ć��}����Pע:58
���������ܷ��u�Q���Pע:48
��ŌW����Щ��Ͷ���SCI�ڿ���ֵ...�Pע:66
ͨ�Ź����ИIՓ���x�}�Pע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�Pע:120
�u�Q�lՓ�ĺ�߀�dz������Pע:68
��ӡ���Y����Ҫ�D�d��Դ�ڿ���...�Pע:51
����Փ�ķ���
�����OӋՓ�� ����Ҏ��Փ�� �V�IՓ�� �C�һ�w��Փ�� ���bՓ�� ��ͨ�\ݔՓ�� ����Փ�� ���Փ�� ˮ��Փ�� �Ԅӻ�Փ�� ܇�vՓ�� ұ��Փ�� ���I�OӋՓ�� �CеՓ��

�ڿ��ٿƆ���
- �zӰˇ�g�I��AHCI�ڿ����]��Photog
- Nature���¶��W���ӿ�Nature Commu
- ��С�W�̎�ֵ���˽⣬�@Щ�����W��
- 2025�ꌑ����WՓ�Ŀ����õ�19���x
- �y�L�I��Ƽ������ڿ��x�� �p������
- ���r�_Փ�ęz���C������Ҫ
- �Ї�ˮ�a�ƌW�ڿ��Ǻ����ڿ���
- ���H������Ҫ�˽�Ć��}���
- ���������ܷ��u�Q��
- ��ŌW����Щ��Ͷ���SCI�ڿ���ֵ��
- ͨ�Ź����ИIՓ���x�}
- SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ���
- �u�Q�lՓ�ĺ�߀�dz�����
- ��ӡ���Y����Ҫ�D�d��Դ�ڿ���20
- Ӣ���ڿ����峣Ҋ��Փ�Ġ�B�����